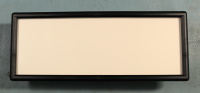
How to setup CAN-FD on the Raspberry Pi 2 using MCP2517FD
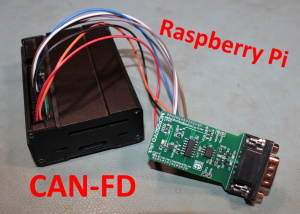
An advanced KNX network gateway
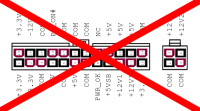
ATX12VO from an engineering viewpoint
A repair of the Behringer X32 Rack PSU.
How to control the brightness of many LEDs
Korg-M3-Restoration
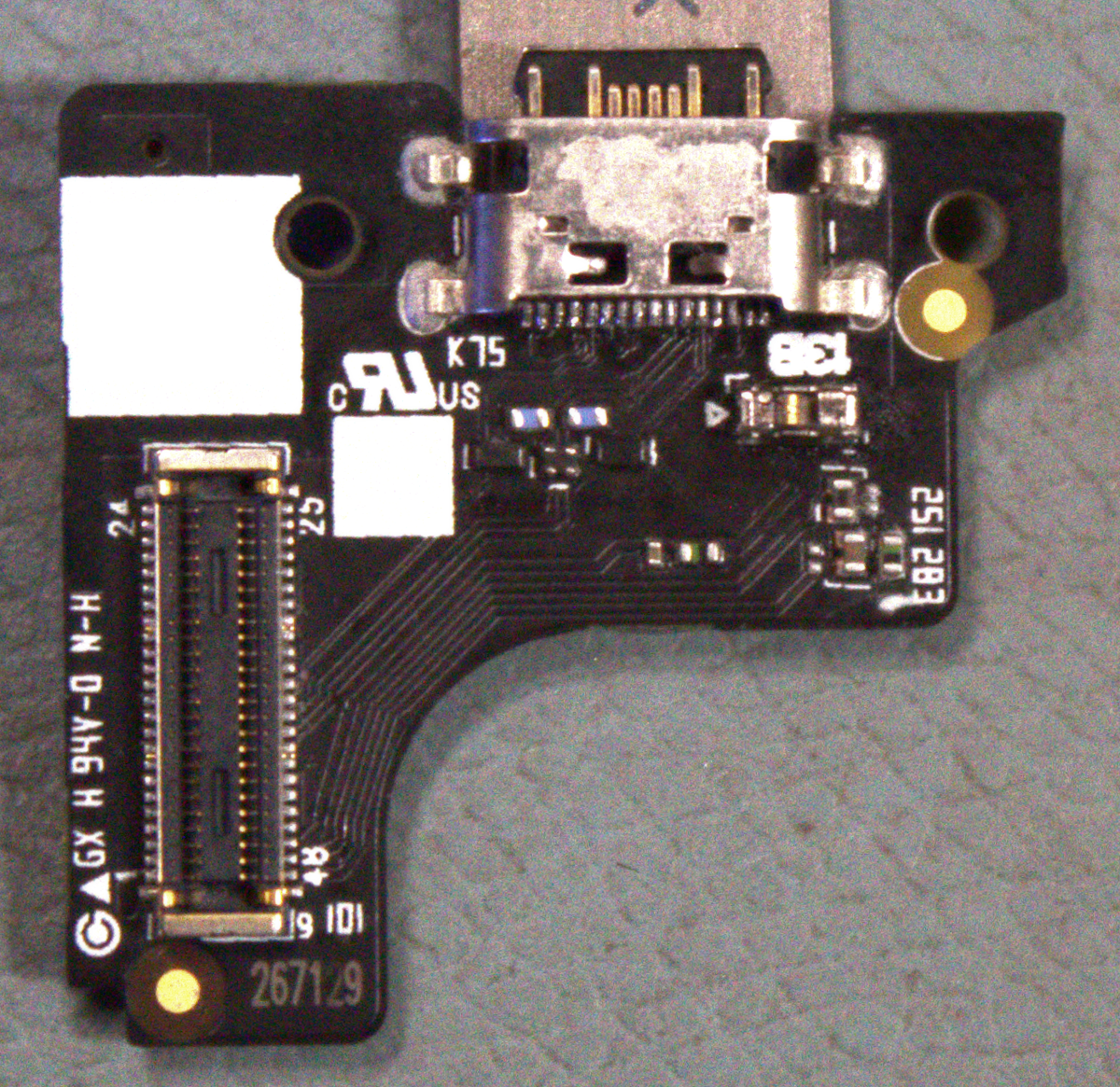
A Repair of the USB-C connection without any spare parts.
CAN-Bus via a serial connection
An in-depth review of the Eurolite LED PAR-16 3CT
How to setup CAN-FD on the Raspberry Pi 5 using MCP2517FD
A big effort for a small effect
I don't even know
A button and two LEDs
How to build a good looking lighting solution.
A repair of the Valeo 530 29 912 Wiper Motor control electronics.
Energiemonitor für den Netzwerkschrank
Ein günstiger (Schneide-)Plotter für viele Anwendungen.
Ein einfacher einstieg in die Welt der Audio DSPs.
Die (hoffentlich) komplette Bauanleitung einer Wersi Helios als PDF.
Wie man viele LEDs mit wenig aufwand dimmt.
Ein Displymodul auf Basis eines ARM-Cortex M4
Ein Microcontroller-System bassierned auf einem ATmega2560.